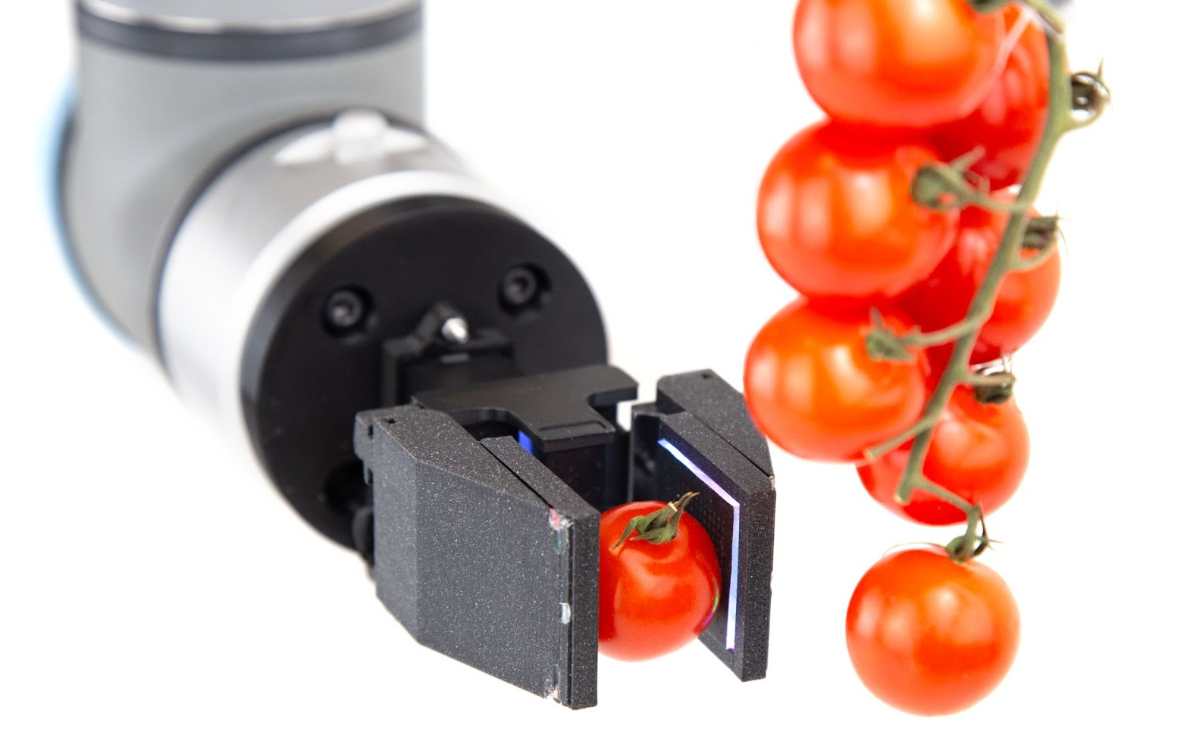
FruitTouch: A Perceptive Gripper for Gentle and Scalable Fruit Harvesting
Published in Under Review (2025), 2025
We propose FruitTouch, a compact gripper that integrates high-resolution, vision-based tactile sensing to enable gentle, scalable fruit harvesting with real-time force, slip, and softness estimation.
Recommended citation: Ruohan Zhang, Amin Mirzaee, Wenzhen Yuan. (2025). FruitTouch: A Perceptive Gripper for Gentle and Scalable Fruit Harvesting.
